
A team of computer scientists from Bielefeld University has conducted a study to investigate how visualizations in augmented reality can increase users’ understanding, trust, and acceptance of a robot. The results will feed into the Transregio research project B05, which aims to use visualizations to provide explanations.
“Robots can help with basic tasks in care, industry, or home. But for a robot to be accepted in society, we users must be able to trust it. And we can only do that if we understand them,” says Helen Beierling, research assistant in the Transregio subproject B05 “Co-constructing explainability with an interactive learning robot.” With project leader Dr. Anna-Lisa Vollmer, Robin Helmert, and Leonie Dyck from the “Medical Assistance Systems” working group at Bielefeld University, she has tested a possible approach to increasing a robot’s transparency.
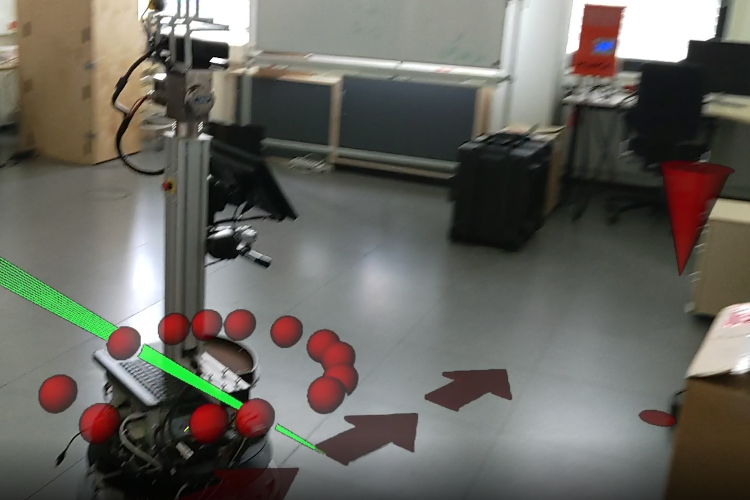
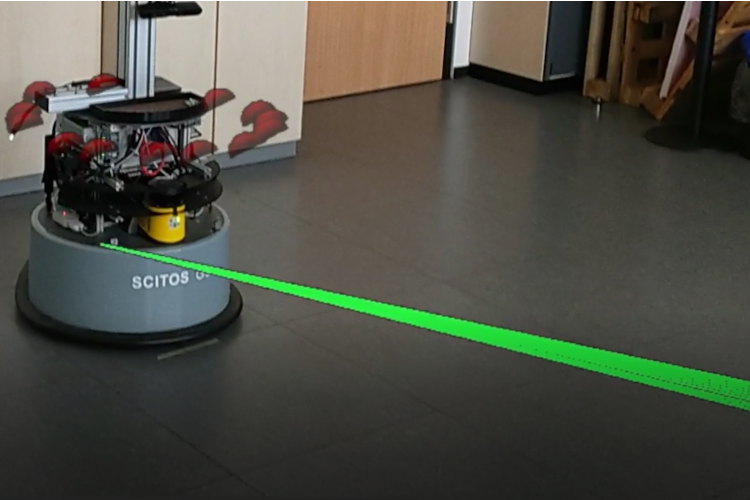
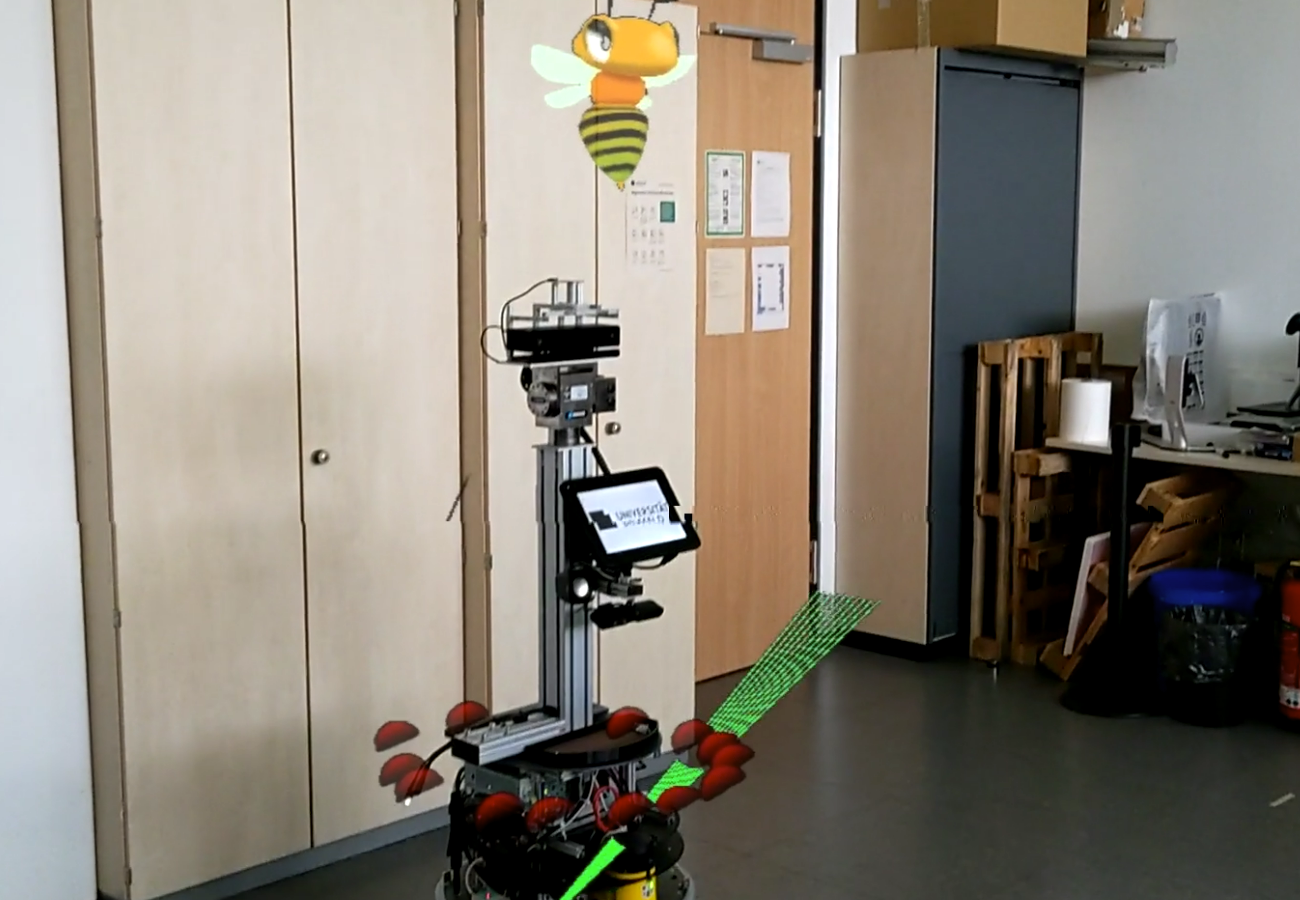
To do this, the computer scientists created augmented reality (AR) visualizations of how a robot works, which they presented to users during a robot demonstration. In the demonstration, the robot was asked to perform a navigation task. The visualizations showed why the robot behaved unexpectedly, for example, when it had to re-plan, collided with an object, or failed to reach its destination. The second group did not see any visualizations. “The study shows a possible connection between AR visualizations and user understanding as well as trust towards the robot. Whether this could be a familiarization effect or an effect of prior knowledge has to be investigated in further studies," says Vollmer.
The team published their study in the paper "Technical Transparency for Robot Navigation Through AR Visualisations." It was presented in the Late-Breaking Reports (LBR) section at HRI 2023, the Human-Robot Interaction conference, 13-16 March in Stockholm. With the LBR, the conference offers authors* the opportunity to present early results and new ideas on cutting-edge research.
Link to the paper „Technical Transparency for Robot Navigation Through AR Visualizations“



{kind=link}
{kind=link}
{kind=link}